Prosthetic Hand
In this project, we tackled the challenge of creating a functional yet affordable prosthetic hand by leveraging the unique advantages of Series Elastic Actuators (SEA). Traditional prosthetic hands often come with exorbitant price tags and complex control systems, making them inaccessible to many amputees. Our solution? A 3D-printed, cable-driven design powered by just two motors in an antagonistic configuration. This minimalist approach not only reduces costs but also simplifies control, bringing us closer to a practical, everyday solution for those who need it most.
One of the standout features of this prosthetic hand is its ability to mimic natural movements with remarkable adaptability. Thanks to the SEA setup, the fingers automatically adjust to the shape of objects—a concept we call morphological grasp. Imagine picking up a delicate paper cup or a rugged tool; the hand intuitively conforms to the object’s form without requiring complex user input. This is achieved through carefully optimized pulley diameters and tension springs, which work in harmony to synchronize finger movements. The result is a prosthetic hand that feels more intuitive and less taxing to use, addressing a critical pain point for amputees who often struggle with the cognitive load of controlling multi-sensor devices.
Beyond adaptability, the design prioritizes safety and efficiency. The SEA configuration allows for seamless switching between position and force control, ensuring a secure grip without crushing fragile objects. For instance, during testing, the hand could apply just the right amount of force to hold a folded paper, from a light touch to a firmer grasp—all controlled by simple motor position adjustments. Additionally, the built-in slip detection system monitors torque variations to alert users of potential drops, while the energy-saving mode (enabled by motor brakes) minimizes power consumption during prolonged use. These features collectively make the hand not only functional but also sustainable for long-term daily wear.
The impact of this work extends beyond technical achievements. By cutting production costs significantly—up to ten times cheaper than commercial alternatives like the Bebionic hand—we’re paving the way for broader accessibility. The prosthetic’s lightweight PLA construction (weighing just 300 grams) and ergonomic design further enhance its practicality. Looking ahead, we’re excited to explore integrations like vibrotactile feedback and active thumb adjustment to make the hand even more versatile.
Below, you’ll find snapshots of the hand in action, from its intricate cable-pulley mechanism to real-world grasping demonstrations. Each image tells a part of the story—how simplicity in design can lead to profound improvements in the quality of life. For a deeper dive into the technical details, check out our full paper or watch the video demonstration.
 |
|---|
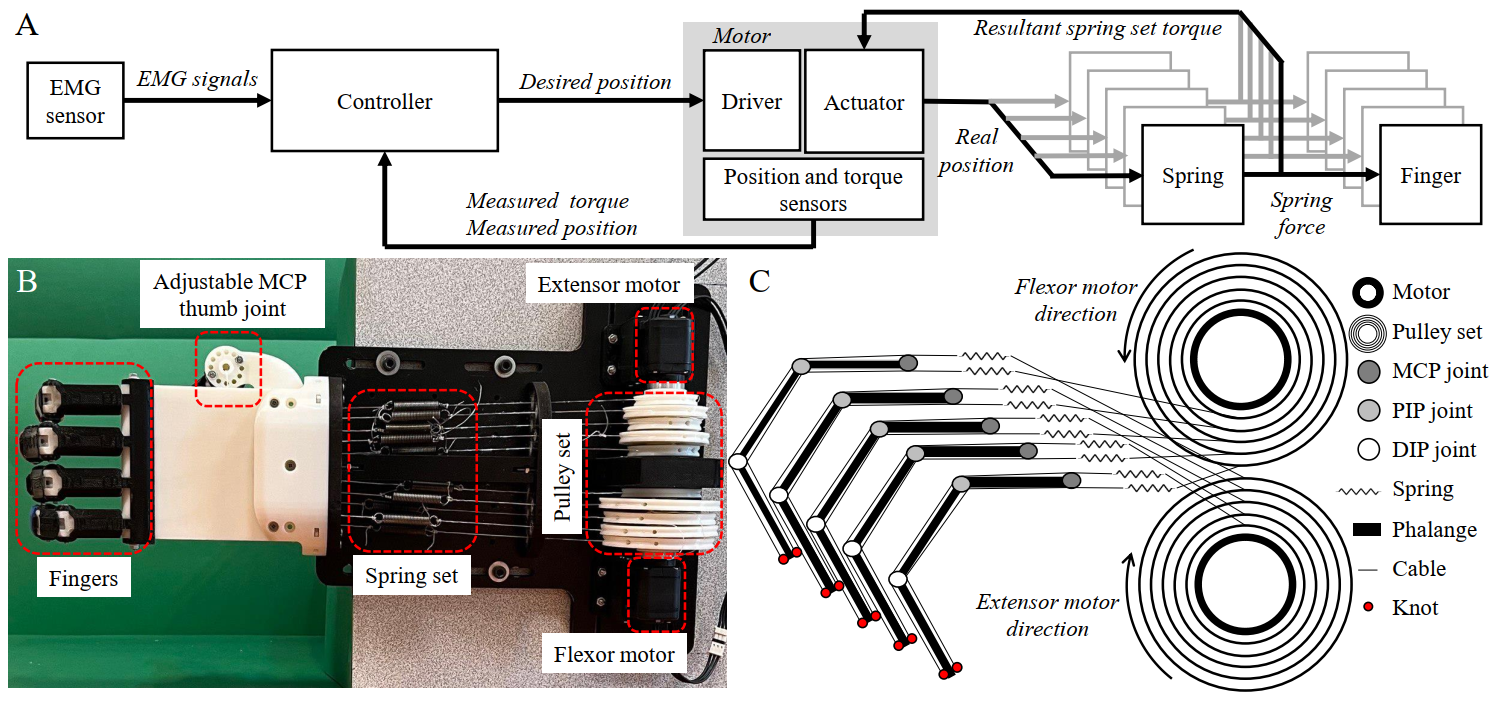
| The prosthetic hand’s control diagram, setup, and power transmission system schematic; i.e., SEA realization |
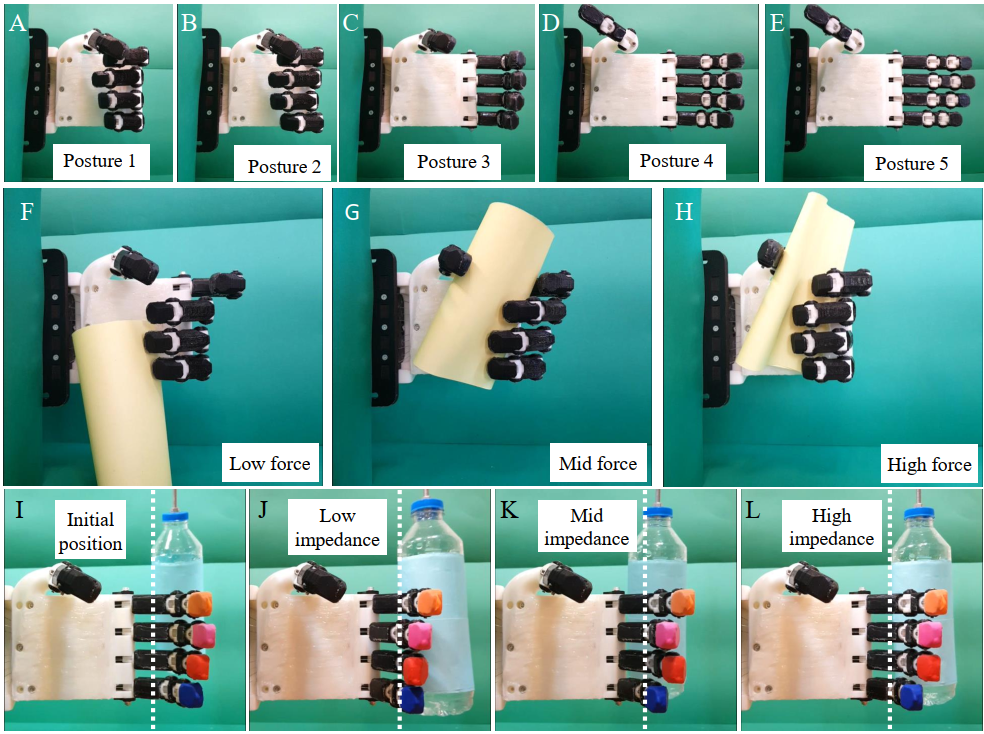 |
| The experimental results of position, force, and impedance control |
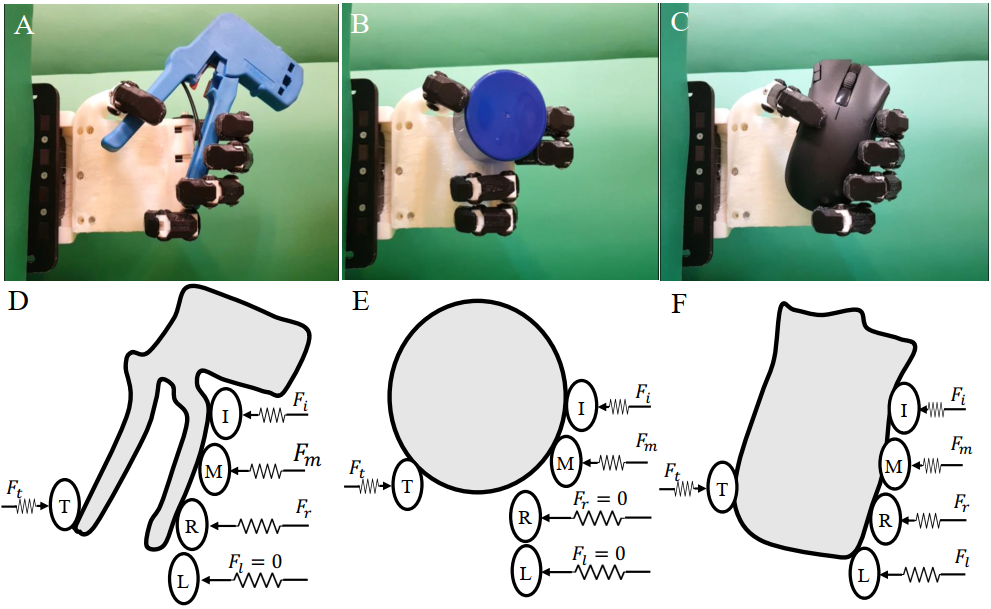 |
| TThe schematic and experimental results for morphological grasp |